2. Simulation of arbitrary transfer functions
In some cases we can calculate the response of a system to an input completely analytically using Sympy as discussed in other notebooks. Sometimes these methods are not sufficient as they fail to calculate the inverse or because we have different inputs. This notebook covers several methods of simulating systems of arbitrary complexity.
[1]:
import numpy
import matplotlib.pyplot as plt
%matplotlib inline
2.1. Convert to ODE and integrate manually
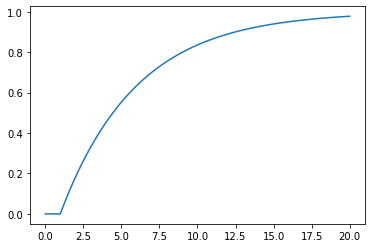
We are very familiar with the Euler integration method by now. Let’s recap a quick simulation of a first-order system
We can rewrite this in the time domain as
[2]:
K = 1
tau = 5
This is our input function. Note that it could be anything (not just a step)
[3]:
def u(t):
if t<1:
return 0
else:
return 1
[4]:
ts = numpy.linspace(0, 20, 1000)
dt = ts[1]
y = 0
ys = []
for t in ts:
dydt = -1/tau*y + 1/tau*u(t)
y += dydt*dt
ys.append(y)
[5]:
plt.plot(ts, ys)
[5]:
[<matplotlib.lines.Line2D at 0x231e91d1eb0>]
2.2. LTI support in scipy.signal
Notice in the previous code that all the differential equations were linear and that that none of the coefficients of the variables change over time. Such a system is known as a Linear, Time Invariant (LTI) system. The scipy.signal module supplies many functions for dealing with LTI systems
[6]:
import scipy.signal
We define an LTI system by passing the coefficients of the numerator and denominator to the lti constructor
[7]:
numerator = K
denominator = [tau, 1]
G = scipy.signal.lti(numerator, denominator)
[8]:
G
[8]:
TransferFunctionContinuous(
array([0.2]),
array([1. , 0.2]),
dt: None
)
[9]:
type(G)
[9]:
scipy.signal.ltisys.TransferFunctionContinuous
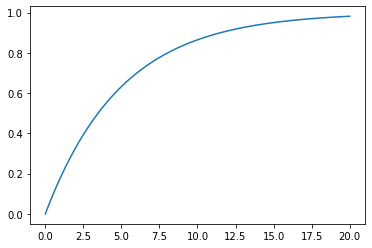
2.2.1. Step responses
We can obtain the step response of the system by using the step method of the object
[10]:
def plotstep(G):
_, ys_step = G.step(T=ts)
plt.plot(ts, ys_step);
[11]:
plotstep(G)
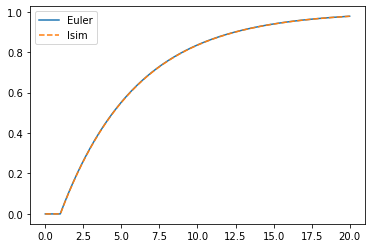
2.2.2. Responses to arbitrary inputs
We can also find the response of the system to an arbitrary input signal by using scipy.signal.lsim(). This is useful when simulating a complicated response or a response to an input read from a file.
[12]:
us = [u(t) for t in ts] # evaluate the input function at all the times
_, ys_lsim, xs = scipy.signal.lsim(G, U=us, T=ts)
plt.plot(ts, ys)
plt.plot(ts, ys_lsim, '--');
plt.legend(['Euler', 'lsim'])
[12]:
<matplotlib.legend.Legend at 0x231ea2517c0>
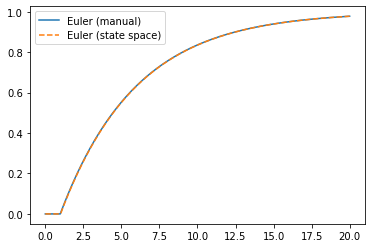
2.2.3. Manual integration using state space form
We can also use our Euler loop to simulate arbitrary systems using the state space representation
- :nbsphinx-math:`begin{align}
dot{x} &= Ax + Bu \ y &= Cx + Du
end{align}`
This is a useful technique when simulating Hybrid systems (where some parts are LTI and some are nonlinear systems).
Luckily the lti object we created earlier can be converted to a state space representation.
[13]:
Gss = G.to_ss()
Gss
[13]:
StateSpaceContinuous(
array([[-0.2]]),
array([[1.]]),
array([[0.2]]),
array([[0.]]),
dt: None
)
[14]:
x = numpy.zeros((Gss.A.shape[0], 1))
ys_statespace = []
for t in ts:
xdot = Gss.A.dot(x) + Gss.B.dot(u(t))
y = Gss.C.dot(x) + Gss.D.dot(u(t))
x += xdot*dt
ys_statespace.append(y[0,0])
[15]:
plt.plot(ts, ys)
plt.plot(ts, ys_statespace, '--')
plt.legend(['Euler (manual)', 'Euler (state space)'])
[15]:
<matplotlib.legend.Legend at 0x231ea2dfdf0>
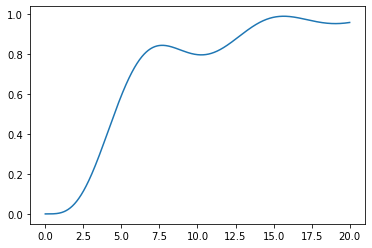
2.2.4. Demonstration for higher order functions
As mentioned before, Sympy cannot always be used to obtain inverse Laplace transforms. The scipy.signal functions continue to work for higher order functions, too. Let’s find the step response of the following transfer function:
Feel free to uncomment and run the block below: I gave up waiting for the inverse to be calculated.
[16]:
# import sympy
# s, t = sympy.symbols('s, t')
# G2 = 1/(s**3 + 2*s**2 + s + 1)
# r = sympy.inverse_laplace_transform(G2/s, s, t)
However, the step response is calculated quickly by the LTI object.
[17]:
numerator = 1
denominator = [1, 2, 1, 1]
G2 = scipy.signal.lti(numerator, denominator)
[18]:
plotstep(G2)
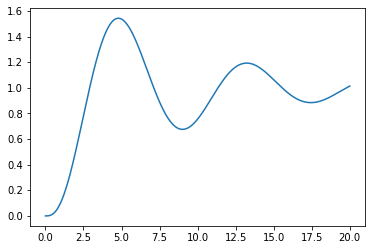
2.2.5. State space for higher order functions
[19]:
Gss = G2.to_ss()
[20]:
Gss
[20]:
StateSpaceContinuous(
array([[-2., -1., -1.],
[ 1., 0., 0.],
[ 0., 1., 0.]]),
array([[1.],
[0.],
[0.]]),
array([[0., 0., 1.]]),
array([[0.]]),
dt: None
)
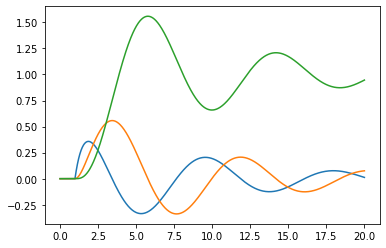
We can use the same code as before. Now, I’m going to store all the states as well. Notice that we have three states for the third order system.
[21]:
x = numpy.zeros((Gss.A.shape[0], 1))
ys_statespace = []
xs = []
for t in ts:
xdot = Gss.A.dot(x) + Gss.B.dot(u(t))
y = Gss.C.dot(x) + Gss.D.dot(u(t))
x += xdot*dt
ys_statespace.append(y[0, 0])
# We need to copy otherwise the x update will overwrite all the values
xs.append(x.copy())
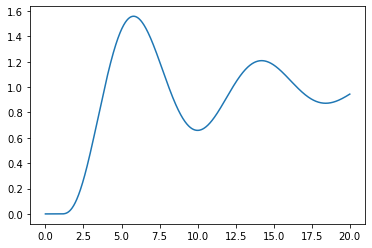
[22]:
plt.plot(ts, ys_statespace)
[22]:
[<matplotlib.lines.Line2D at 0x231eb3bad90>]
[23]:
plt.plot(ts, numpy.concatenate(xs, axis=1).T)
[23]:
[<matplotlib.lines.Line2D at 0x231ea3750a0>,
<matplotlib.lines.Line2D at 0x231ea3750d0>,
<matplotlib.lines.Line2D at 0x231ea375460>]
2.2.6. Systems in series
What if we wanted to see the response of \(G_3(s) = G(s) G_2(s)\)? You may expect that we would be able to find the product of two transfer functions, but the scipy.signal functions don’t allow this.
[24]:
G
[24]:
TransferFunctionContinuous(
array([0.2]),
array([1. , 0.2]),
dt: None
)
[25]:
# G*G2
# TypeError Traceback (most recent call last)
# <ipython-input-25-2585f2f9cba1> in <module>()
# ----> 1 G*G2
# TypeError: unsupported operand type(s) for *: 'TransferFunctionContinuous' and 'TransferFunctionContinuous'
Instead, we could use the convolution of the numerators and the denominators. This is equivalent to polynomial multiplication. For instance, let’s work out \((s + 1)^3\)
[26]:
numpy.convolve(numpy.convolve([1, 1], [1, 1]), [1, 1])
[26]:
array([1, 3, 3, 1])
[27]:
G.num
[27]:
array([0.2])
[28]:
numerator = numpy.convolve(G.num, G2.num)
numerator
[28]:
array([0.2])
[29]:
denominator = numpy.convolve(G.den, G2.den)
denominator
[29]:
array([1. , 2.2, 1.4, 1.2, 0.2])
[30]:
G3 = scipy.signal.lti(numerator, denominator)
[31]:
plotstep(G3)
2.3. 3. Control module
Another option for handling LTI systems is to use the Python Control Systems Libaray. Unfortunately, this is not included in anaconda, so you will have to install it before use by uncommenting the line below and running it:
[32]:
#!pip install control
[33]:
import control
A big benefit of this module is that its transfer function objects support arithmetic operations:
[34]:
G = control.tf(K, [tau, 1])
G2 = control.tf(1, [1, 2, 1, 1])
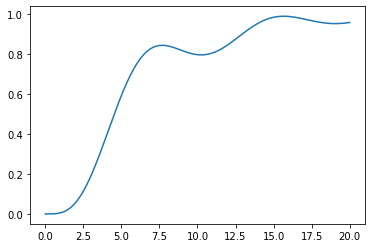
G3 = G*G2
[35]:
_, y = control.step_response(G3, ts)
plt.plot(ts, y)
[35]:
[<matplotlib.lines.Line2D at 0x231eb5af490>]
[ ]: