3. First-order system with proportional control
Consider the simple feedback loop shown below
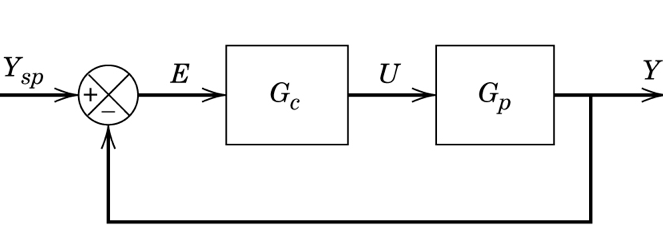
with \(G_c=K_c\) and \(G_p=\frac{1}{\tau s + 1}\)
[1]:
%matplotlib inline
[2]:
import sympy
sympy.init_printing()
[3]:
G_c = K_C = sympy.Symbol('K_C', positive=True)
[4]:
s = sympy.Symbol('s')
tau = sympy.Symbol('tau', positive=True)
[5]:
G_p = 1/(tau*s + 1)
G_p
[5]:
$$\frac{1}{s \tau + 1}$$
[6]:
G_OL = G_p*G_c
[7]:
from tbcontrol.loops import feedback
The target is to get \(y_{SP} = y\)
[8]:
G_CL = feedback(G_OL, 1).cancel()
G_CL
[8]:
$$\frac{K_{C}}{K_{C} + s \tau + 1}$$
[9]:
t = sympy.Symbol('t', positive=True)
[10]:
general_timeresponse = sympy.inverse_laplace_transform(sympy.simplify(G_CL/s), s, t)
general_timeresponse
[10]:
$$\frac{K_{C} \left(e^{\frac{t \left(K_{C} + 1\right)}{\tau}} - 1\right) e^{- \frac{t \left(K_{C} + 1\right)}{\tau}}}{K_{C} + 1}$$
[11]:
import numpy
[12]:
import matplotlib.pyplot as plt
[13]:
y_func = sympy.lambdify((K_C, tau, t), general_timeresponse, 'numpy')
[14]:
smootht = numpy.linspace(0, 5)
[15]:
def response(K_C=10, tau=10):
y = y_func(K_C, tau, smootht)
e = 1 - y
fig, [ax_y, ax_e] = plt.subplots(2, 1)
ax_y.plot(smootht, y)
ax_y.axhline(1)
ax_y.set_ylabel('Setpoint and y')
ax_e.plot(smootht, e)
ax_e.set_ylabel('Error')
[16]:
from ipywidgets import interact
[17]:
interact(response, K_C=(0, 100), tau=(0, 20))
[17]:
<function __main__.response(K_C=10, tau=10)>
3.1. Offset as function of gain
[18]:
r = 1/s
[19]:
y = r*G_CL
[20]:
e = r - y
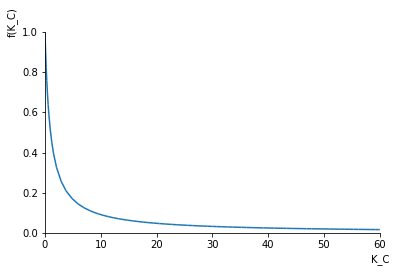
Use the final value statement to obtain eventual offset:
[21]:
steady_offset = sympy.limit(s*e, s, 0)
steady_offset
[21]:
$$\frac{1}{K_{C} + 1}$$
Note the steady state offset is not a function of the system dynamics (time constant).
[22]:
sympy.plot(steady_offset, (K_C, 0, 60))
[22]:
<sympy.plotting.plot.Plot at 0x1141865f8>
3.2. Second order system with proportional control
[23]:
import matplotlib.pyplot as plt
[24]:
zeta = sympy.Symbol('zeta')
[25]:
G = 1/(tau**2*s**2 + 2*tau*zeta*s + 1)
G
[25]:
$$\frac{1}{s^{2} \tau^{2} + 2 s \tau \zeta + 1}$$
[26]:
G_CL = feedback(G*K_C, 1).cancel()
G_CL
[26]:
$$\frac{K_{C}}{K_{C} + s^{2} \tau^{2} + 2 s \tau \zeta + 1}$$
[27]:
def response(new_K_C, new_tau, new_zeta):
real_CL = G_CL.subs({K_C: new_K_C, tau: new_tau, zeta: new_zeta})
timeresponse = sympy.inverse_laplace_transform(sympy.simplify(real_CL/s), s, t)
sympy.plot(timeresponse, 1, (t, 0, 100))
poles = sympy.solve(sympy.denom(sympy.simplify(real_CL)), s)
plt.plot([sympy.re(p) for p in poles], [sympy.im(p) for p in poles], 'x', markersize=10)
plt.axhline(0, color='black')
plt.axvline(0, color='black')
plt.axis([-1, 1, -1, 1])
[28]:
interact(response, new_K_C=(0., 100), new_tau=(0, 10.), new_zeta=(0, 2.));
[ ]: