8. Simple discrete simulation: Dahlin controller
This notebook replicates Figure 17.11 in Seborg et al without using analytic methods. If you want to get some insight into the math behind the z transform, applied to the same problem see the Dahlin controller notebook.
[1]:
import tbcontrol
[2]:
tbcontrol.expectversion('0.2.1')
[3]:
from tbcontrol import blocksim
[4]:
import matplotlib.pyplot as plt
%matplotlib inline
[5]:
import numpy
import control
8.1. Simple discretisation
The control module supplies an easy access point to a transfer function which represents s.
[6]:
s = control.TransferFunction.s
[7]:
K = 1
τ1 = 5
τ2 = 3
θ = 0
[8]:
Δt = 1
[9]:
assert θ % Δt == 0 # this is only correct when the delay is a multiple of the sampling time
N = int(θ/Δt)
[10]:
G = K/((τ1*s + 1)*(τ2*s + 1))
Discretize G assuming a zero order hold in front of it, this corresponds to using Table 17.1
[11]:
z = control.TransferFunction.z
[12]:
Gz = G.sample(Δt)*z**(-N)
Gz
[12]:
8.2. Do discrete transfer function math
Dahlin controller relationship
[13]:
λ = Δt # this is a tuning parameters
[14]:
A = numpy.exp(-Δt/λ)
Gdc = 1/Gz * (1 - A)*z**(-N - 1) / (1 - A*z**-1 - (1 - A)*z**(-N - 1)) # eq 17.65
After these calculations Gdc is
[15]:
Gdc
[15]:
Notice that there are “extra” orders of z above and below the line in that expression - we could simplify it. This is what .minreal does.
[16]:
Gdc = Gdc.minreal()
[17]:
Gdc
[17]:
Much better.
8.3. Convert from positive to negative powers of z
We still have a problem, though, since the control library uses positive powers of \(z\) rather than negative powers of \(z\). tbcontrol.conversion contains some methods to help convert such polynomials. Also notice that the .num and .den properties of the control library’s tf objects are designed for MIMO systems, so they are nested lists corresponding with the index of the output and the input we want. Since we’re just looking at one input and one output, we need the first
element of the first element ([0][0]).
[18]:
import tbcontrol.conversion
[19]:
Gdc_neg_num, Gdc_neg_den = tbcontrol.conversion.discrete_coeffs_pos_to_neg(Gdc.num[0][0], Gdc.den[0][0])
[20]:
Gdc_neg_num
[20]:
[22.59988127611586, -34.69674036625465, 13.258134912008916]
[21]:
Gdc_neg_den
[21]:
[1.0, -0.1628886995509321, -0.8371113004490679]
8.4. Simple blocksim simulation
[22]:
blocksim_G = blocksim.LTI('G', 'u', 'yu', G.num[0][0], G.den[0][0])
[23]:
blocksim_Gdc = blocksim.DiscreteTF('Gc', 'e', 'u', 1, Gdc_neg_num, Gdc_neg_den)
[24]:
diagram = blocksim.simple_control_diagram(blocksim_Gdc, blocksim_G, ysp=blocksim.step(starttime=5))
[25]:
ts = numpy.arange(0, 20, 0.01)
[26]:
result = diagram.simulate(ts)
[27]:
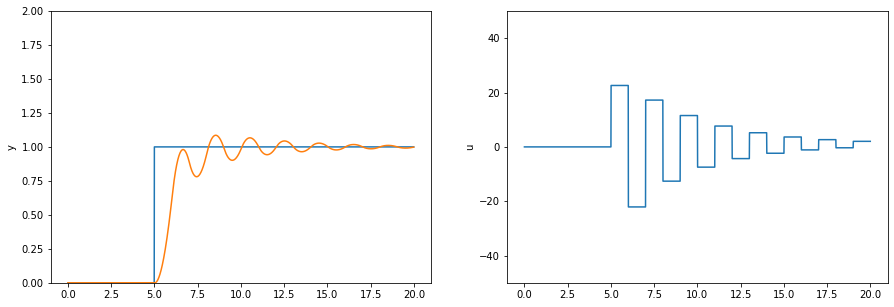
def plot_outputs(result):
fig, (ax_y, ax_u) = plt.subplots(1, 2, figsize=(15, 5))
ax_y.plot(ts, result['ysp'])
ax_y.plot(ts, result['y'])
ax_y.set_ylim(0, 2)
ax_y.set_ylabel('y')
ax_u.plot(ts, result['u'])
ax_u.set_ylim(-50, 50)
ax_u.set_ylabel('u')
[28]:
plot_outputs(result)