2. Multivariable Stability analysis
When we used proportional control on SISO systems we observed that there is usually an upper bound on the controller gain \(K_c\) above which the controlled system becomes unstable. Let’s investigate the equivalent calculation for MIMO systems.
[1]:
import sympy
sympy.init_printing()
%matplotlib inline
[2]:
s = sympy.Symbol('s')
This matrix is from example 16.2 in Seborg
[3]:
Gp = sympy.Matrix([[2/(10*s + 1), sympy.Rational('1.5')/(s + 1)],
[sympy.Rational('1.5')/(s + 1), 2/(10*s + 1)]])
Gp
[3]:
[4]:
K_c1, K_c2 = sympy.symbols('K_c1, K_c2', real=True)
Unlike in SISO systems, we now have a choice of pairing. We will see that there are differences in the stability behaviour for the different pairings.
[5]:
diagonal = True
[6]:
if diagonal:
Gc = sympy.Matrix([[K_c1, 0],
[0, K_c2]])
else:
Gc = sympy.Matrix([[0, K_c2],
[K_c1, 0]])
[7]:
I = sympy.Matrix([[1, 0],
[0, 1]])
The characteristic equation can be obtained from the \(|I + GpGc|\). I divide by 4 here to obtain a final constant of 1 like in the example to make comparison easier. Make sure you understand that any constant multiple of the characteristic equation will have the same poles and zeros.
[8]:
charpoly = sympy.poly(sympy.numer((I + Gp*Gc).det().cancel())/4, s)
Compare with Equation 16-20:
[9]:
charpoly2 = sympy.poly(
sympy.numer(
((1 + Gc[0,0]*Gp[0,0])*(1 + Gc[1,1]*Gp[1,1]) - Gc[0,0]*Gc[1,1]*Gp[0,1]*Gp[1,0]).cancel()
)/4, s)
[10]:
charpoly == charpoly2
[10]:
True
Now that we have a characteristic polynomial, we can determine stability criteria using the routh function from tbcontrol.symbolic.
[11]:
from tbcontrol.symbolic import routh
[12]:
R = routh(charpoly)
[13]:
R[0, 0]
[13]:
All the remaining elements of the left hand row must be positive (the same sign as the first element)
[14]:
requirements = True
for r in R[1:, 0]:
requirements = sympy.And(requirements, r>0)
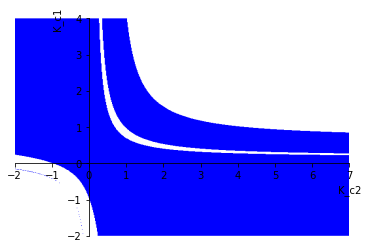
The graph below is supposed to match the textbook, but as of 2019-03-30 it does not. This appears to be a bug in plot_implicit.
[15]:
sympy.plot_implicit(requirements, (K_c2, -2, 7), (K_c1, -2, 4))
[15]:
<sympy.plotting.plot.Plot at 0x1217574e0>
As an alternative, let’s evaluate numerically
[16]:
import numpy
[17]:
import matplotlib.pyplot as plt
%matplotlib inline
[18]:
f = sympy.lambdify((K_c2, K_c1), requirements)
[19]:
nK_c2, nK_c1 = numpy.meshgrid(numpy.linspace(-2, 4, 300), numpy.linspace(-2, 7, 300))
[20]:
r = f(nK_c2, nK_c1)
[21]:
plt.pcolor(nK_c2, nK_c1, r)
plt.ylabel('K_c1')
plt.xlabel('K_c2')
[21]:
Text(0.5, 0, 'K_c2')

We can see that even this simple system can exhibit more complicated behaviour than we may expect from first order systems because of the extra loops formed by the controllers.