3. Multivariable pairing (RGA)
For a 2$:nbsphinx-math:`times`$2 system, we have 2 choices of pairing variables for distributed control:
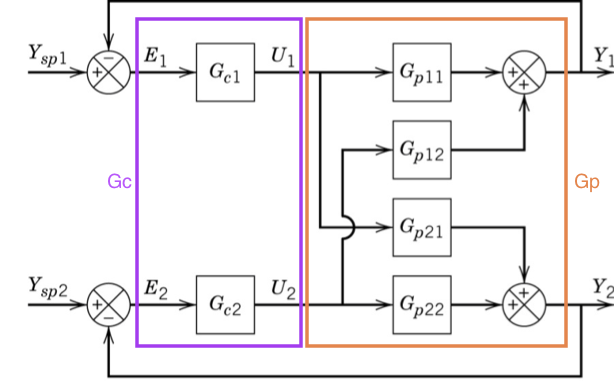
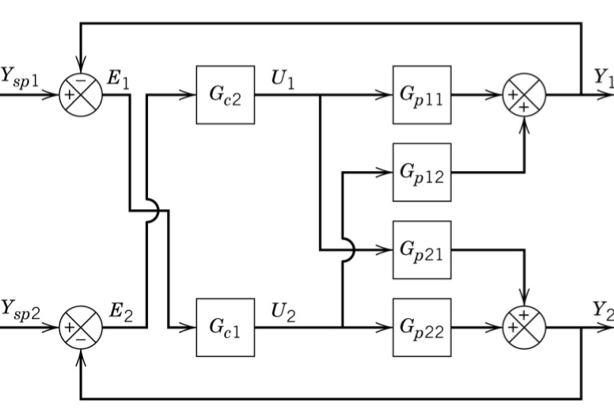
Bristol developed the Relative Gain Array to determine good pairings based on only the plant transfer function matrix \(G_p\). The elements of the RGA are defined as
We could build \(\Lambda\) by direct evaluation of the above derivatives near some point given a time-domain model, but if we already have a transfer function model, we can evaluate the steady-state gain matrix \(K\) by using the final value theorem.
[1]:
import sympy
sympy.init_printing()
[2]:
s = sympy.Symbol('s')
[3]:
def fopdt(k, theta, tau):
return k*sympy.exp(-theta*s)/(tau*s + 1)
Using the system from example 16.5
[4]:
G_p = sympy.Matrix([[fopdt(-2, 1, 10), fopdt(1.5, 1, 1)],
[fopdt(1.5, 1, 1), fopdt(2, 1, 10)]])
G_p
[4]:
Unfortunately sympy cannot calculate limits on matrix expressions
[5]:
#K = sympy.limit(G_p, s, 0)
But we can apply a function to the elements:
[6]:
def gain(G):
return sympy.limit(G, s, 0)
[7]:
K = G_p.applyfunc(gain)
[8]:
K
[8]:
We can then calculate \(\Lambda = K \otimes H\) where \(H = (K^{-1})^{T}\):
[9]:
Lambda = K.multiply_elementwise(K.inv().transpose())
Lambda
[9]:
We can do the same calculation (faster) using numpy:
[10]:
import numpy
[11]:
def fopdt(k, theta, tau):
return k*numpy.exp(-theta*s)/(tau*s + 1)
[12]:
s = 0
[13]:
K = numpy.matrix([[fopdt(-2, 1, 10), fopdt(1.5, 1, 1)],
[fopdt(1.5, 1, 1), fopdt(2, 1, 10)]])
The .A attribute in matrices is the matrix as a numpy.array, which multiplies elementwise by default.
[14]:
K.A*K.I.T.A
[14]:
array([[0.64, 0.36],
[0.36, 0.64]])
The numpy developers recommended that you should use numpy.array instead of numpy.matrix as much as possible. I find this makes the notation harder to read:
[15]:
K = numpy.array([[fopdt(-2, 1, 10), fopdt(1.5, 1, 1)],
[fopdt(1.5, 1, 1), fopdt(2, 1, 10)]])
[16]:
K*numpy.linalg.inv(K).T
[16]:
array([[0.64, 0.36],
[0.36, 0.64]])
3.1. Simulation results
Let’s simulate this system to get an idea of how the control works out
[17]:
import tbcontrol
tbcontrol.expectversion('0.1.4')
from tbcontrol import blocksim
[18]:
import numpy
[19]:
N = 2
[20]:
G = {}
[21]:
gains = [[-2, 1.5],
[1.5, 2]]
taus = [[10, 1],
[1, 10]]
delays = [[1, 1],
[1, 1]]
[22]:
for inp in range(N):
for outp in range(N):
G[(outp, inp)] = blocksim.LTI(f"G_{outp}_{inp}", f"u_{inp}", f"yp_{inp}_{outp}",
gains[outp][inp], [1, taus[outp][inp]], delays[outp][inp])
[23]:
inputs = {'ysp_0': blocksim.step(),
'ysp_1': blocksim.step(starttime=50)}
[24]:
sums = {f'y_{outp}': [f"+yp_{inp}_{outp}" for inp in range(N)] for outp in range(N)}
for i in range(N):
sums[f'e_{i}'] = [f'+ysp_{i}', f'-y_{i}']
[25]:
sums
[25]:
{'y_0': ['+yp_0_0', '+yp_1_0'],
'y_1': ['+yp_0_1', '+yp_1_1'],
'e_0': ['+ysp_0', '-y_0'],
'e_1': ['+ysp_1', '-y_1']}
[26]:
import matplotlib.pyplot as plt
%matplotlib inline
[27]:
def simulate(auto1=True, K1=-1, tauI1=10, auto2=True, K2=0.5, tauI2=10):
controllers = {'Gc_0': blocksim.PI('Gc_0', 'e_0', 'u_0', K1, tauI1),
'Gc_1': blocksim.PI('Gc_1', 'e_1', 'u_1', K2, tauI2)}
controllers['Gc_0'].automatic = auto1
controllers['Gc_1'].automatic = auto2
ts = numpy.arange(0, 100, 0.125)
diagram = blocksim.Diagram(list(G.values()) + list(controllers.values()), sums, inputs)
result = diagram.simulate(ts)
# plt.figure()
# plt.plot(ts, result['u_0'])
# plt.plot(ts, result['u_1'])
plt.figure()
plt.plot(ts, result['y_0'])
plt.plot(ts, result['ysp_0'])
plt.plot(ts, result['y_1'])
plt.plot(ts, result['ysp_1'])
[28]:
from ipywidgets import interact
[29]:
interact(simulate,
auto1=[True, False], K1=(-2., 0), tauI1=(1., 50),
auto2=[True, False], K2=(0., 2), tauI2=(1., 50))
[29]:
<function __main__.simulate(auto1=True, K1=-1, tauI1=10, auto2=True, K2=0.5, tauI2=10)>