[1]:
import sympy
sympy.init_printing()
%matplotlib inline
1. Direct synthesis PID design
The direct synthesis design technique has a very appealing premise: we choose the desired closed loop behaviour and then rewrite the closed loop transfer function to find the controller which will give us this behaviour.
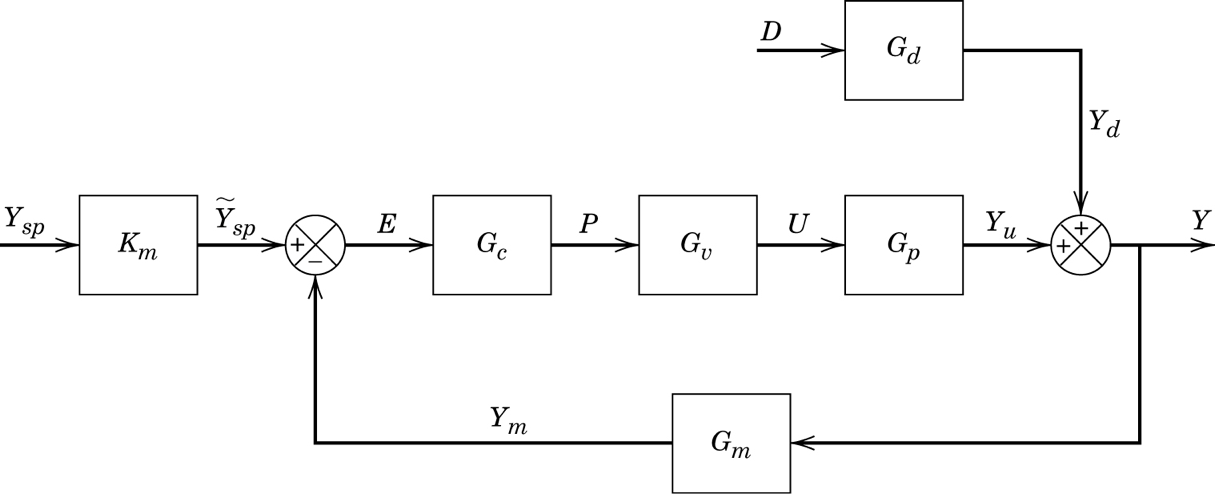
Specifically, we will specify what we want \(\frac{Y}{Y_{SP}}\) to be, given that \(D=0\). We will also then calculate \(\frac{Y}{Y_{SP}}\) from the block diagram and then solve for \(G_C\).
[2]:
s, G_C = sympy.symbols('s, G_C')
tau_c, phi = sympy.symbols('tau_c, phi', positive=True, nonzero=True)
Let’s start by choosing a first order plus dead time response for our system. If any of \(G_v\) or \(G_p\) contain dead time, we cannot avoid that dead time in the response of our system to a setpoint change. Becausre sympy wants to typeset exponents with positive values, I will be using a transformation \(\phi = -\theta\) in this notebook to get forms similar to the textbook.
[3]:
desired_Y_over_Y_sp = sympy.exp(phi*s)/(tau_c*s + 1)
This is what the prototypical response we’ve specified looks like. You can see that \(\tau_c\) specifies the desired speed of the response. Also notice that the gain is 1, so that the process eventually follows the set point.
[4]:
from ipywidgets import interact
[5]:
t = sympy.Symbol('t', positive=True)
def plotresponse(theta=(0, 3.), tau_c_in=(1., 5.)):
desired_response = sympy.inverse_laplace_transform(desired_Y_over_Y_sp.subs({phi: -theta, tau_c: tau_c_in})/s, s, t)
p = sympy.plot(desired_response, (t, 0, 10), show=False)
p2 = sympy.plot(1, (t, 0, 10), show=False)
p.append(p2[0])
p.show()
interact(plotresponse);
Now, we calculate the closed loop transfer function. We will assume we have a model of the system called \(\widetilde{G}\)
[6]:
Gtilde = sympy.Symbol(r'\widetilde{G}')
actual_Y_over_Y_sp = Gtilde*G_C/(1 + Gtilde*G_C)
To find the controller expression which will achieve our desired response, we simply solve for desired = actual
[7]:
G_C_solved, = sympy.solve(desired_Y_over_Y_sp - actual_Y_over_Y_sp, G_C)
G_C_solved
[7]:
We will approximate the dead time in the denominator by a first order Taylor expansion. Note that this choice is not completely unique. In general, we will choose the approximation (Padé or Taylor) which results the correct order of transfer function in the next steps.
[8]:
denom = sympy.denom(G_C_solved)
G_C_rational = G_C_solved*denom/denom.subs(sympy.exp(phi*s), 1 + phi*s)
[9]:
G_C_rational.simplify()
[9]:
Now we can relate this to PID parameters for a general process. Here we have a PID controller expression.
[10]:
K_C, tau_I, tau_D = sympy.symbols('K_C, tau_I, tau_D', positive=True, nonzero=True)
PID = K_C*(1 + 1/(tau_I*s) + tau_D*s)
PID.expand().together()
[10]:
For reference, we could also go for the ISA realizable controller, but then we’d need a different dead time approximation.
[11]:
alpha = sympy.symbols('alpha')
[12]:
ISA = K_C*(1 + 1/(tau_I*s) + tau_D*s/(alpha*tau_D*s + 1))
[13]:
num, den = ISA.cancel().as_numer_denom()
[14]:
num.collect(s)
[14]:
And here we have a second order process with dead time.
[15]:
K, tau_c, tau_1, tau_2, phi, theta = sympy.symbols('K, tau_c, tau_1, tau_2, phi, theta', positive=True)
G = K*sympy.exp(phi*s)/((tau_1*s + 1)*(tau_2*s + 1))
G
[15]:
Our goal is to find the PID parameters which match the rational \(G_C\) we derived earlier.
[16]:
target_G_C = G_C_rational.subs(Gtilde, G).expand().together()
We will create an object to hold on to equality in residual form (\(G_c = G_{PID} \iff G_c - G_{PID} = 0\)
[17]:
zeroeq = (target_G_C - PID).simplify()
[18]:
numer, denom = zeroeq.as_numer_denom()
eq = sympy.poly(numer, s)
The following straightforward solution of the equations yields the correct result.
[19]:
eqs = eq.coeffs()
[20]:
eqs
[20]:
[21]:
sympy.solve(eqs, [K_C, tau_D, tau_I], dict=True)
[21]:
Note that neglecting the dict=True argument above does not currently work for Python 3.6 (see this issue). If the solution process fails for you, read on below.
1.1. Alternate solution
If the simple solution above didn’t work, we can do it a little more manually. Look at those equations again
[22]:
eqs
[22]:
With a little bit of help from us to choose the correct order to solve, we can get the solution in the book.
[23]:
solution = {}
solution[K_C] = sympy.solve(eqs[1], K_C)[0]
solution[tau_D] = sympy.solve(eqs[0], tau_D)[0].subs(solution)
solution[tau_I] = sympy.solve(eqs[2], tau_I)[0].subs(solution).simplify()
solution
[23]:
[ ]: