We covered the idea of simulating an arbitrary transfer function system in a previous notebook. What happens if we have to simulate a controller (specified as a transfer function) and a system specified by differential equations together?
3. Nonlinear tank system
Let’s take the classic tank system, with a square root flow relationship on the outflow and a nonlinear valve relationship.
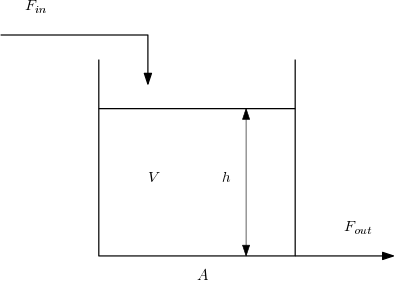
- :nbsphinx-math:`begin{align}
frac{dV}{dt} &= (F_{in} - F_{out}) \ h &= frac{V}{A} \ f(x) &= alpha^{x - 1} \ F_{out} &= K f(x) sqrt{h} \
end{align}`
[1]:
import numpy
import matplotlib.pyplot as plt
%matplotlib inline
Parameters
[2]:
A = 2
alpha = 20
K = 2
Initial conditions (notice I’m not starting at steady state)
[3]:
Fin = 1
h = 1
V = A*h
x0 = x = 0.7
Valve characterisitic
[4]:
def f(x):
return alpha**(x - 1)
Integration time
[5]:
ts = numpy.linspace(0, 100, 1000)
dt = ts[1]
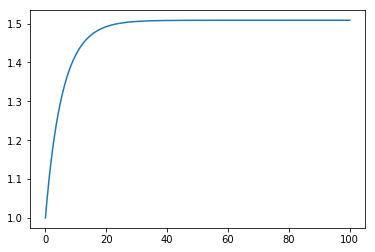
Notice that I have reordered the equations here so that they can be evaluated in order to find the volume derivative.
[6]:
hs = []
for t in ts:
h = V/A
Fout = K*f(x)*numpy.sqrt(h)
dVdt = Fin - Fout
V += dVdt*dt
hs.append(h)
[7]:
plt.plot(ts, hs)
[7]:
[<matplotlib.lines.Line2D at 0x10e93ca20>]
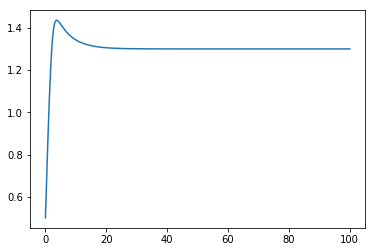
4. PI Control
Now we can include a controller controlling the level by manipulating the valve fraction
[8]:
import scipy.signal
Let’s do a PI controller:
[9]:
Kc = -1
tau_i = 5
In versions of scipy < 1.0, Gc would automatically have a .A attribute. After 1.0, we need to convert to state space explicitly with .to_ss().
[10]:
Gc = scipy.signal.lti([Kc*tau_i, Kc], [tau_i, 0]).to_ss()
[11]:
hsp = 1.3
[12]:
V = 1
hs = []
xc = numpy.zeros([Gc.A.shape[0], 1])
for t in ts:
h = V/A
e = hsp - h # we cheat a little here - the level we use to calculate the error is from the previous time step
# e is in the input to the controller, yc is the output
dxcdt = Gc.A.dot(xc) + Gc.B.dot(e)
yc = Gc.C.dot(xc) + Gc.D.dot(e)
x = x0 + yc[0,0] # x0 is the controller bias
Fout = K*f(x)*numpy.sqrt(h)
dVdt = Fin - Fout
V += dVdt*dt
xc += dxcdt*dt
hs.append(h)
[13]:
plt.plot(ts, hs)
[13]:
[<matplotlib.lines.Line2D at 0x1c1a0f31d0>]