2. PID step responses
Here are some open loop step responses of PID controllers in different configurations.
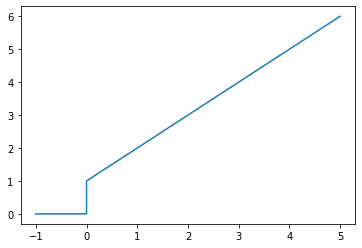
2.1. PI
[1]:
import control
import numpy
import matplotlib.pyplot as plt
%matplotlib inline
[2]:
s = control.tf([1, 0], 1)
ts = numpy.linspace(0, 5)
[3]:
def plot_step_response(G):
t, y = control.step_response(G, ts)
# Add some action before time zero so that the initial step is visible
t = numpy.concatenate([[-1, 0], t])
y = numpy.concatenate([[0, 0], y])
plt.plot(t, y)
[4]:
K_C = 1
[5]:
tau_I = 1
[6]:
Gc = K_C*(1 + 1/(tau_I*s))
[7]:
plot_step_response(Gc)
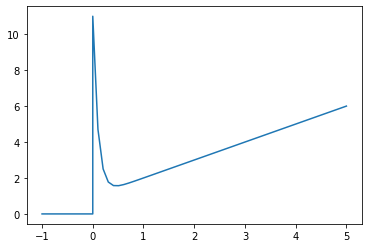
2.2. PID
Because the ideal PID is unrealisable, we can’t plot the response of the ideal PID, but we can do it for the realisable ISA PID.
\[G_c = K_C\left( 1 + \frac{1}{\tau_I s} + \frac{\tau_D s}{\alpha \tau_D s + 1} \right)\]
[13]:
alpha = 0.1
tau_D = 1
[14]:
Gc = K_C*(1 + 1/(tau_I*s) + 1*s/(alpha*tau_D*s + 1))
[15]:
plot_step_response(Gc)
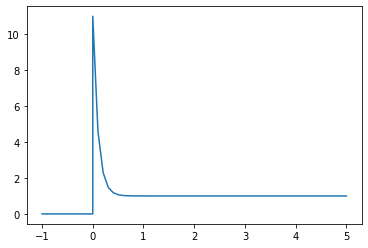
2.3. PD
[16]:
Gc = K_C*(1 + 1*s/(alpha*tau_D*s + 1))
[17]:
plot_step_response(Gc)
[ ]: