1. Closed loop stability
Stability of closed loop control systems appears to be easy to determine. We can just calculate the closed loop transfer function and invert the Laplace transform.
[1]:
import sympy
sympy.init_printing()
[2]:
%matplotlib inline
[3]:
s = sympy.Symbol('s')
[4]:
K_c, t = sympy.symbols('K_c, t', positive=True)
These are the systems from Example 10.4 in Seborg et al
[5]:
G_c = K_c
G_v = 1/(2*s + 1)
G_p = G_d = 1/(5*s + 1)
G_m = 1/(s + 1)
[6]:
K_m = sympy.limit(G_m, s, 0)
[7]:
forward = G_c*G_v*G_p
backward = G_m
G_CL = K_m*forward/(1 + forward*backward)
[8]:
sympy.simplify(G_CL)
[8]:
[9]:
y = G_CL/s
Now for the moment of truth. Uncomment the next line if you have a lot of time on your hands…
[10]:
#yt = sympy.inverse_laplace_transform(y, s, t)
So that didn’t really work as we expected. Can we at least calculate the roots of the denominator?
[11]:
ce = sympy.denom(G_CL.simplify())
ce.expand()
[11]:
[12]:
roots = sympy.solve(ce, s)
OK, that approach works, but is limited in the analytic case to 4th order polynomials
[13]:
sympy.plot(*[sympy.re(r) for r in roots], (K_c, 1, 20))
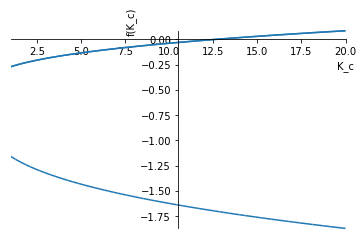
[13]:
<sympy.plotting.plot.Plot at 0x11b5e0978>
We can see that one root gets a positive real part around \(K_c=12.5\)
2. Using the control library
We quickly run out of SymPy’s abilities when calculating closed loop transfer functions. Let’s try to do it with the control library instead:
[14]:
import control
import numpy
import scipy.signal
import matplotlib.pyplot as plt
%matplotlib inline
[15]:
s = control.tf([1, 0], [1])
[16]:
G_v = 1/(2*s + 1)
G_p = G_d = 1/(5*s + 1)
G_m = 1/(s + 1)
K_m = 1
[17]:
from tbcontrol.loops import feedback
[18]:
def closedloop(K_c):
G_c = K_c
G_CL = K_m*feedback(G_c*G_v*G_p, G_m)
return G_CL
[19]:
closedloop(2)
[19]:
[20]:
from ipywidgets import interact
[21]:
smootht = numpy.linspace(0, 20)
[22]:
loop = G_v*G_p*G_m
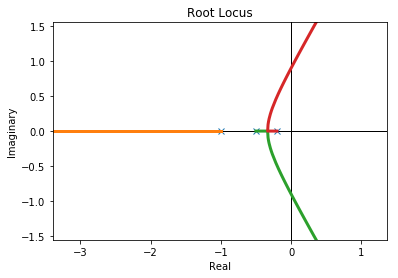
[23]:
_ = control.rlocus(loop)
/Users/alchemyst/anaconda3/lib/python3.7/site-packages/matplotlib/figure.py:98: MatplotlibDeprecationWarning:
Adding an axes using the same arguments as a previous axes currently reuses the earlier instance. In a future version, a new instance will always be created and returned. Meanwhile, this warning can be suppressed, and the future behavior ensured, by passing a unique label to each axes instance.
"Adding an axes using the same arguments as a previous axes "
[24]:
def response(K_C):
G_CL = closedloop(K_C)
poles = G_CL.pole()
plt.plot(*control.step_response(G_CL, smootht))
_ = control.rlocus(loop)
plt.scatter(poles.real, poles.imag, color='red')
[25]:
interact(response, K_C=(1., 20.))
[25]:
<function __main__.response(K_C)>
Now, the step response is calculated quickly enough that we can interact with the graphics using the slider!
2.1. Direct substitution
From our exploration above it is clear there is a zero of the characteristic equation at \(K_C \approx 13\). Let’s solve for this numerically:
[26]:
def chareq(x):
Kc, omega = x
s = 1j*omega
ce = 1 + Kc*loop
ce_of_s = ce(s)
return ce_of_s.real, ce_of_s.imag
[27]:
import scipy.optimize
[28]:
scipy.optimize.fsolve(chareq, [13, 1])
[28]:
array([12.6 , 0.89442719])
How can we determine stability without calculating the roots? See the next notebook.